
Saisir sans mesurer : une main robotique à architecture tendineuse
Il y a quelque chose de paradoxal dans la manière dont nous saisissons les objets fragiles. Moins nous serrons, plus nous tenons bien. La douceur n’est pas l’absence de force — c’est une forme d’intelligence distribuée dans la matière même de nos mains : les tendons s’étirent, les coussins adipeux de la paume s’écrasent légèrement, les muscles de l’avant-bras dosent leur contraction sans que nous ayons jamais besoin d’y prêter attention. C’est précisément ce « sans que nous ayons jamais besoin d’y prêter attention » qui fascine les ingénieurs en robotique — et qui les désespère depuis des décennies.
La robotique industrielle classique a longtemps contourné cette difficulté par la puissance de calcul : mesurer, corriger, mesurer encore. Des capteurs de force aux extrémités des doigts transmettent des signaux, des algorithmes sélectionnent les ajustements nécessaires, des moteurs répondent en conséquence. La boucle est serrée, rapide, efficace — tant que l’objet est prévisible. Mais dès que l’environnement devient ce que les ingénieurs nomment « non structuré » — c’est-à-dire à peu près semblable au monde réel, où aucun objet ne se présente deux fois de la même façon — ce cycle de mesure-correction atteint ses limites. Une tomate légèrement trop mûre, un tube pharmaceutique glissé de quelques millimètres, une fraise dont la surface est irrégulière : autant de situations que nos mains traitent sans sourciller, et que les mains robotiques rigides abordent comme des problèmes d’optimisation à résoudre en temps réel.
Une prépublication déposée sur arXiv en mars 2026 (identifiant : 2603.24357v1) par l’équipe de Robert K. Katzschmann au laboratoire de robotique souple de l’ETH Zurich s’attaque à cette question par une autre voie : plutôt qu’affiner le calcul, modifier la matière.
Le principe porte un nom technique — la souplesse structurelle ou déformabilité passive, souvent désignée par le terme anglais compliance — mais l’idée est d’une clarté presque enfantine : concevoir un mécanisme qui se déforme là où il le faut, absorbe les écarts, épouse les irrégularités, non pas parce qu’un algorithme le lui a prescrit, mais parce que sa géométrie et ses matériaux le permettent naturellement. C’est, en quelque sorte, déléguer à la physique ce que l’on aurait autrement confié à l’informatique.
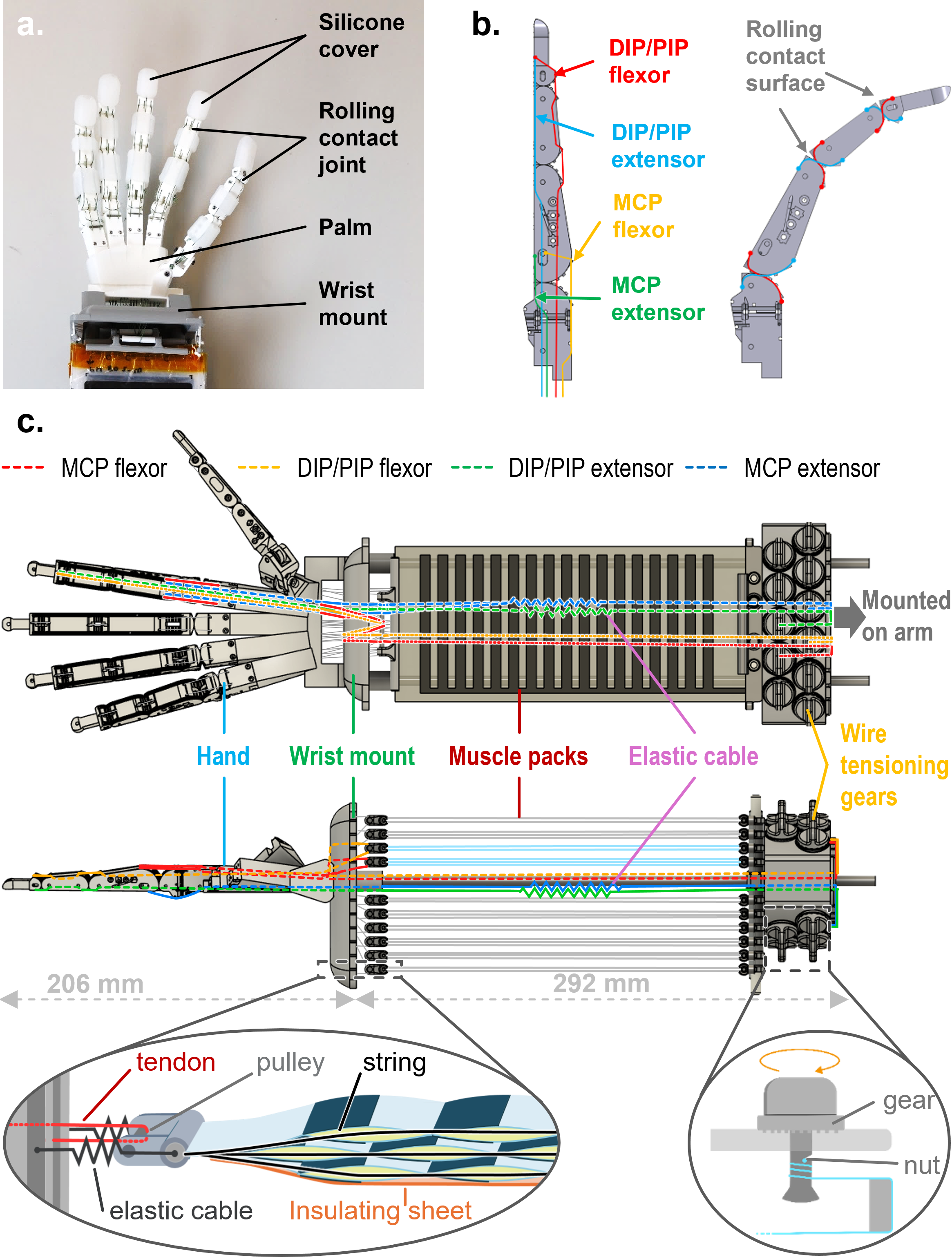
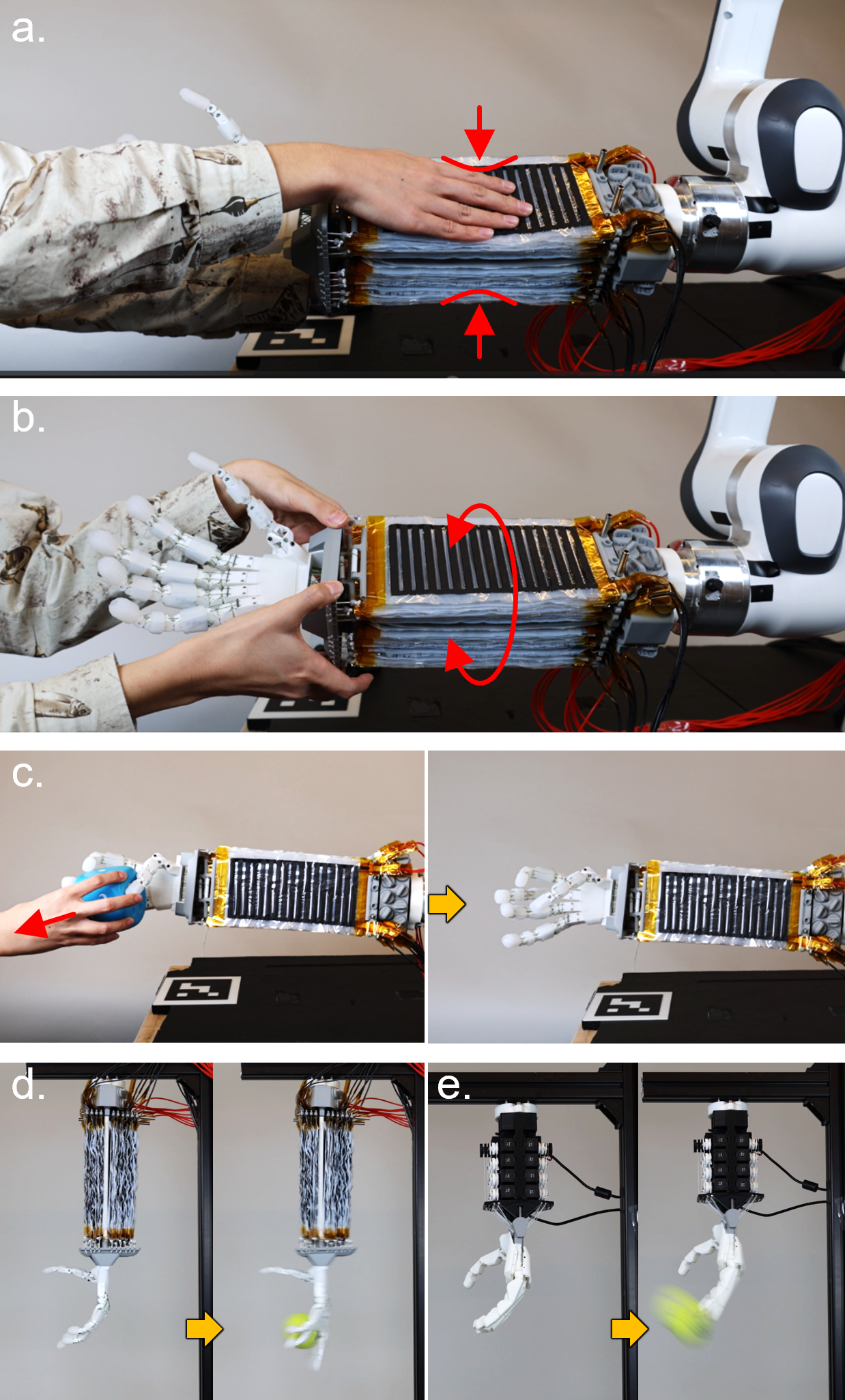
L’architecture proposée reproduit les principes mécaniques de l’anatomie du bras humain. Les actionneurs — les éléments qui génèrent le mouvement, l’équivalent fonctionnel des muscles — sont placés à distance des doigts, comme les muscles de l’avant-bras commandent les mouvements des doigts via des tendons parcourant le poignet jusqu’aux phalanges. Cette déportation du « moteur » loin de l’effecteur n’est pas une curiosité anatomique : elle réduit la masse aux extrémités, ce qui améliore la réactivité et diminue les risques lors d’un contact inattendu. La main n’est plus un ensemble de moteurs déguisés en doigts — elle devient une structure mécanique dont la souplesse est inscrite dans sa topologie même.
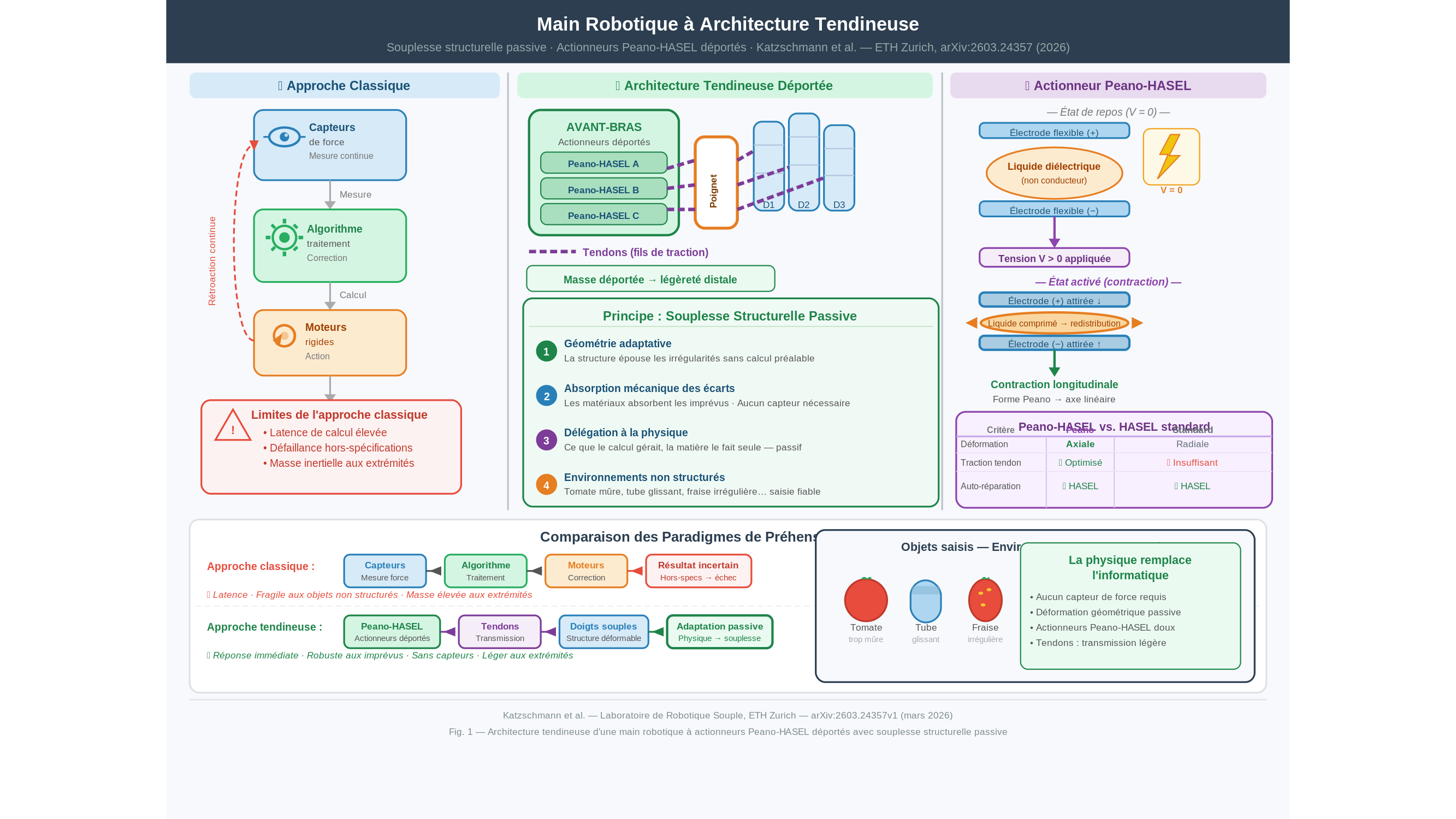
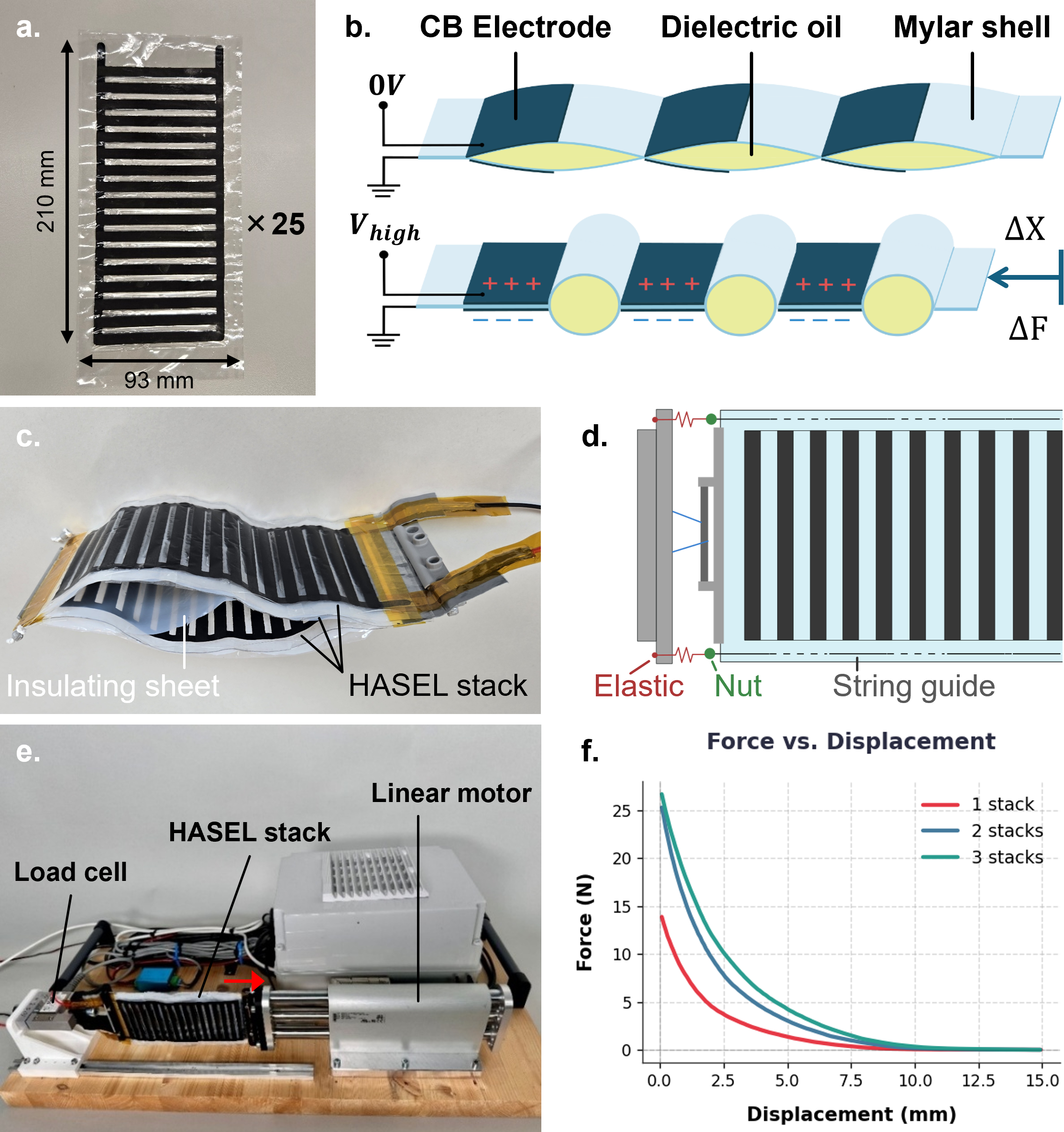
La technologie d’actionnement retenue mérite que l’on s’y arrête. Il s’agit d’actionneurs dits Peano-HASEL — l’acronyme désigne des systèmes électrostatiques hydrauliquement amplifiés et autoréparateurs (Hydraulically Amplified Self-healing ELectrostatic actuators). Le principe : une poche souple remplie d’un liquide diélectrique — c’est-à-dire un fluide qui ne conduit pas l’électricité — est prise en sandwich entre deux électrodes flexibles. Lorsqu’une tension est appliquée, les électrodes s’attirent mutuellement, compriment le liquide qui se redistribue, et provoquent une contraction de la poche. La variante dite « Peano » optimise la forme de la poche pour maximiser cette contraction selon l’axe longitudinal. C’est là que réside la différence avec les actionneurs HASEL génériques, dont la déformation est davantage radiale que linéaire : la version Peano produit un raccourcissement orienté, analogue, au plan fonctionnel, à la contraction d’un muscle squelettique, et donc capable d’actionner un tendon. Cette famille d’actionneurs a été décrite pour la première fois par Kellaris et ses collaborateurs dans Science Robotics en 2018 (Kellaris N. et al., Science Robotics, vol. 3, n° 14, eaar3276 — DOI : 10.1126/scirobotics.aar3276) ; le travail zurichois s’en empare et l’intègre dans une architecture musculo-tendineuse complète.
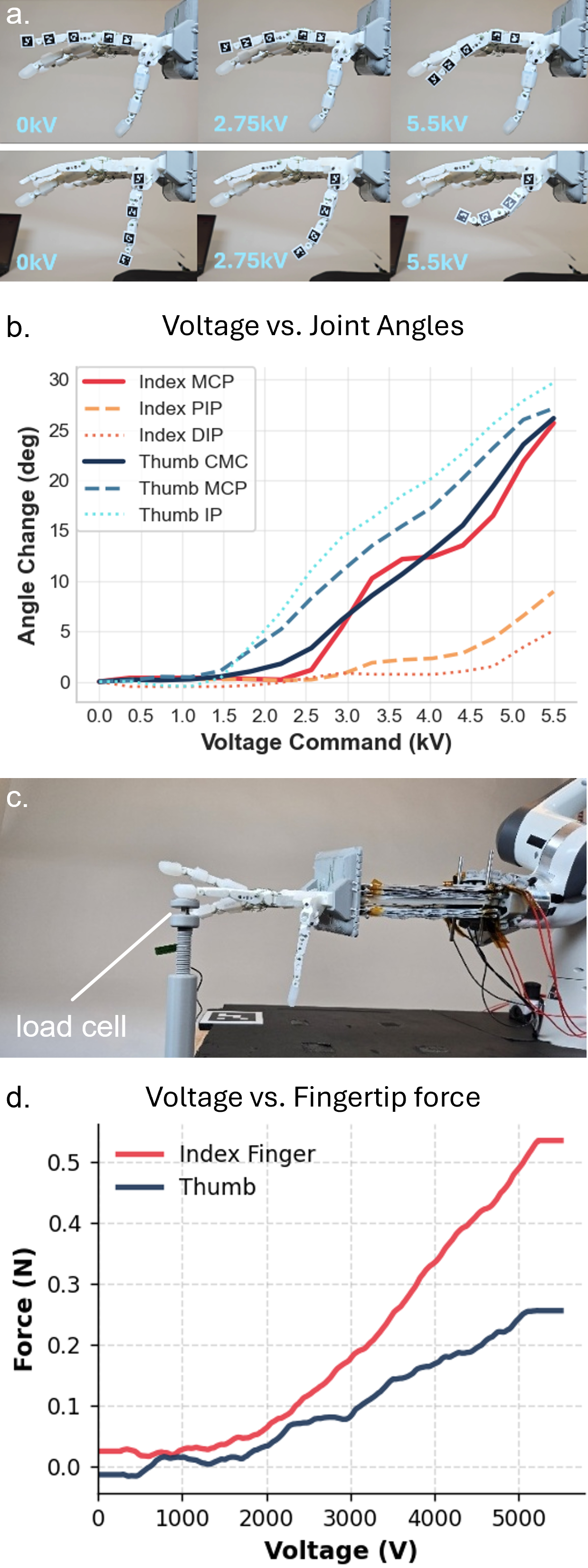
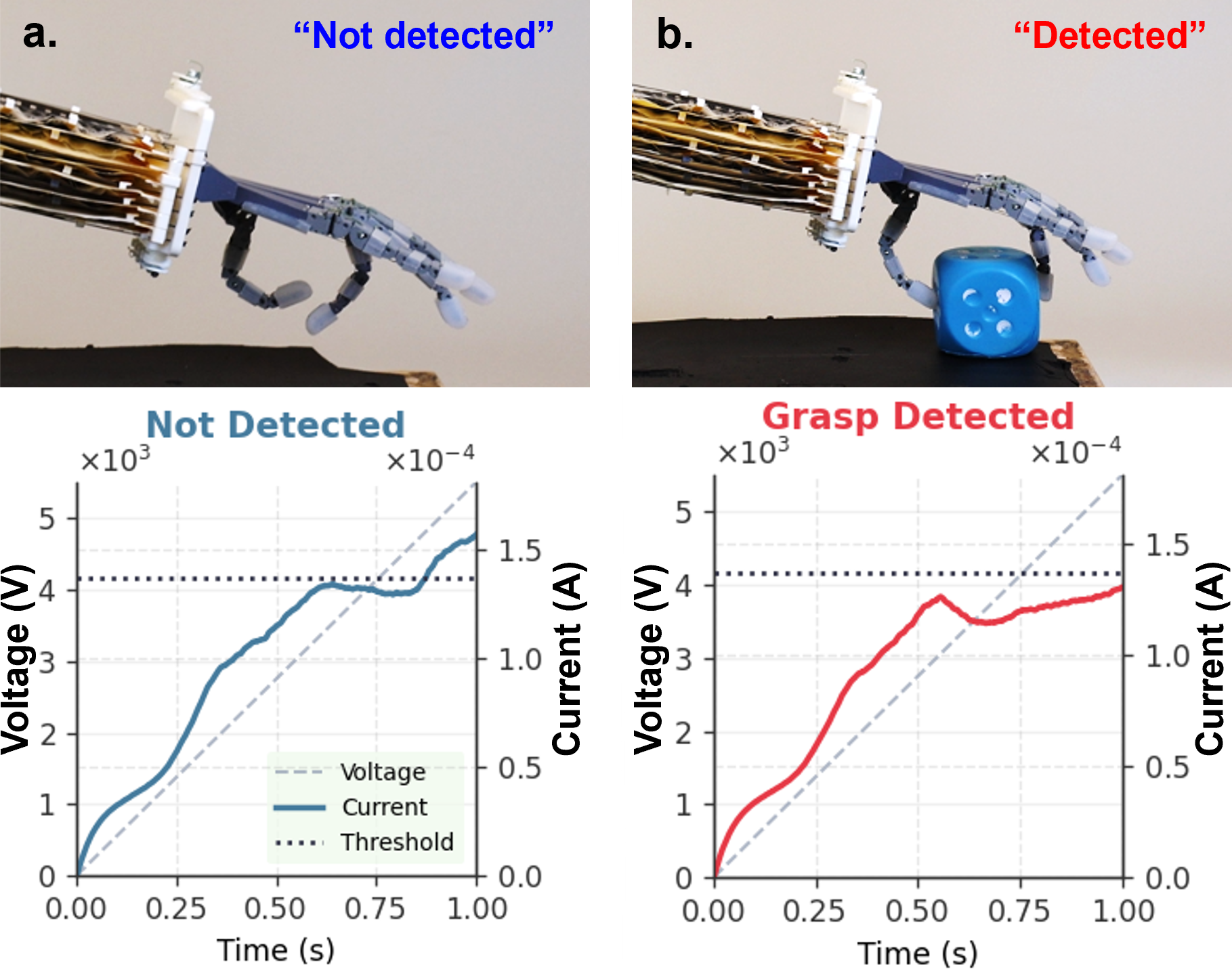
Les expériences rapportées portent sur la manipulation d’objets à géométrie variable en environnement non structuré : l’équipe documente la capacité de la main à adapter sa prise sans recalibration ni retour de force explicite. Ce qui, si les résultats résistent à l’examen, constituerait un point notable dans l’agenda de la robotique de service. Il faut néanmoins souligner que la prépublication n’a pas encore été soumise à évaluation par les pairs : les données précises de force de prise, de raideur en fonction de la charge, de tension de commande et de stabilité temporelle ne sont pas vérifiables sur le seul résumé accessible. Cette réserve n’est pas une coquetterie méthodologique — elle conditionne la portée que l’on peut raisonnablement attribuer aux résultats annoncés.
Les questions ouvertes sur la durabilité méritent d’être nommées comme telles, et non reléguées en note de bas de page. La résistance à long terme des actionneurs Peano-HASEL demeure l’un des points les moins documentés de cette famille de technologies : sous des cycles répétés, la poche souple se fatigue, le diélectrique peut se dégrader, et les performances de contraction diminuent. La sensibilité à l’environnement physique — poussière, humidité, variations thermiques — constitue un autre front de recherche que les auteurs laissent ouvert. On est ici dans une phase d’architecture et de preuve de concept, non dans un système prêt à traverser les contraintes d’un usage prolongé. Ce que la prépublication démontre, c’est la faisabilité d’une intégration cohérente entre actionnement électrohydraulique et cinématique tendineuse ; ce qu’elle ne démontre pas encore, c’est la robustesse de cette intégration dans la durée — ce qui reste précisément l’agenda des années à venir.
On mentionnera pour finir que ces travaux soulèvent des questions qui dépassent l’ingénierie : un système conçu pour interagir physiquement avec des personnes — dans un hôpital, un entrepôt, un domicile — et fonctionnant sans enregistrement de son environnement allège l’architecture électronique, mais complexifie aussi les mécanismes de traçabilité et d’attribution des responsabilités. Ces questions, encore embryonnaires au stade actuel de développement, appellent une attention conjointe des ingénieurs, des juristes et des chercheurs en éthique.
Reste une tension que la physique seule ne dissout pas. La main humaine n’est pas seulement souple — elle est sensible. Elle recueille, à chaque contact, des informations sur la texture, la résistance, la température, et renvoie ces informations vers un système nerveux qui les intègre et les mémorise. La déformabilité passive des matériaux peut reproduire la mécanique de cette souplesse. Peut-elle en reproduire aussi la fonction perceptive ? Ou faut-il accepter que certaines propriétés de la main vivante ne se laissent pas décomposer en sous-problèmes d’ingénierie — qu’elles supposent autre chose, dont nous n’avons peut-être pas encore le nom ?
À lire aussi sur Mémorabilité :
Figures originales du paper

Sources
- Sonoda M., Hinchet R., Kazemipour A., Toshimitsu Y., Katzschmann R. K. et al., A Sensorless, Inherently Compliant Anthropomorphic Musculoskeletal Hand Driven by Electrohydraulic Actuators, prépublication arXiv, mars 2026 — arXiv : 2603.24357v1.
- Kellaris N. et al., Peano-HASEL actuators: Muscle-mimetic, electrohydraulic transducers that linearly actuate and self-heal, Science Robotics, vol. 3, n° 14, eaar3276, 2018 — DOI : 10.1126/scirobotics.aar3276.


